space partition, agents and some reminder for myself
reworked the object class for a voxel spatial tree (with octree divisions but not utilised in the image above) and object class for agents – position, vector, loci, type etc +behaviour i.e. move, move with angle deviation, self collision, attract & repell (by defined type id, similar to the one made using processing last year)
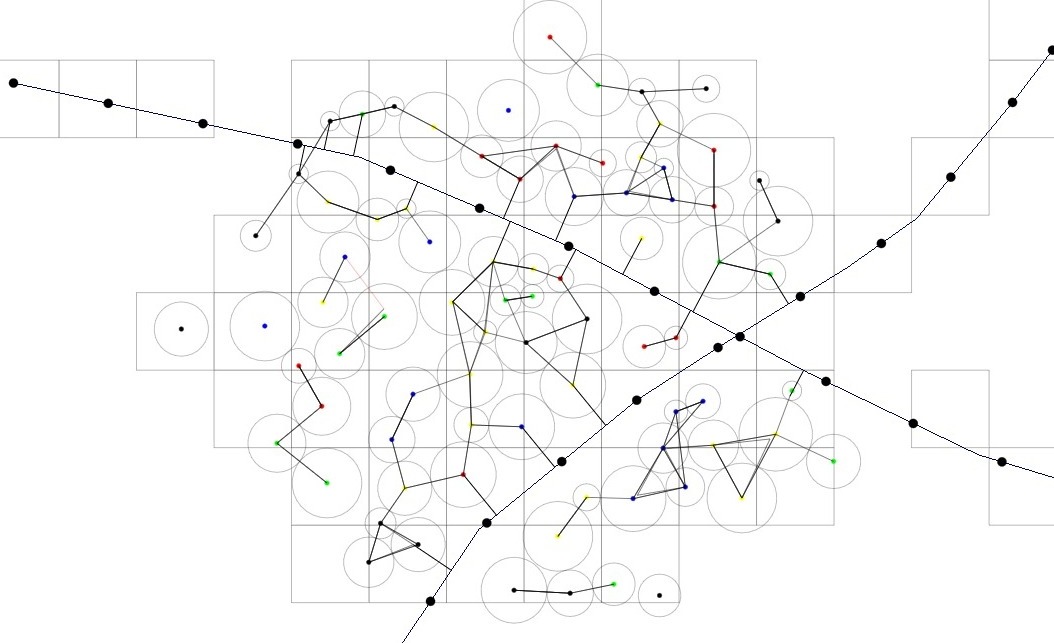
image above shows a test setup looped over for 100 steps with
1. 80 agents starting at random position within a 2d range
2. 2 x maya curves divide and stored into voxel spatial tree
loop: iterate all agents and do the following
1. attraction: same type
2. repell: black-blue, green-blue
3. self collision – avoid overlap
4. repell by maya curves